#include <follow.hh>
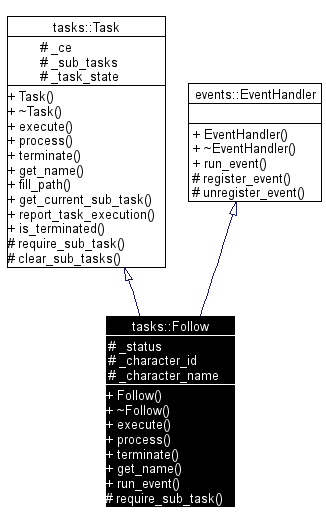
tasks::Followに対する継承グラフ
Public 型 | |
| enum | Status { state_approaching, state_moving } |
| typedef std::list< Task * > | TaskList |
| enum | TaskState { task_initialized, task_running, task_terminated } |
Public メソッド | |
| Follow (const std::string &character_name) | |
| ~Follow () | |
| virtual void | execute () |
| virtual void | process () |
| virtual void | terminate () |
| virtual const std::string & | get_name () const |
| void | run_event (events::EventManager &em, int event_id) |
| void | fill_path (std::string &path) const |
| const Task * | get_current_sub_task () const |
| void | report_task_execution () const |
| bool | is_terminated () const |
| virtual void | run_event (EventManager &em, int event_id) |
Protected メソッド | |
| virtual void | require_sub_task () |
| void | clear_sub_tasks () |
| void | register_event (EventManager &em, int event_id, int priority=0) |
| void | unregister_event (EventManager &em, int event_id, int priority=0) |
Protected 変数 | |
| Status | _status |
| int | _character_id |
| const std::string & | _character_name |
| environment::CronousEnv & | _ce |
| TaskList | _sub_tasks |
| TaskState | _task_state |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tasks::Taskを再定義しています。 関数の呼び出しグラフ:  |
|
|
関数の呼び出しグラフ:  |
|
|
|
|
|
tasks::Taskを再定義しています。 |
|
|
|
|
|
tasks::Taskを再定義しています。 関数の呼び出しグラフ: 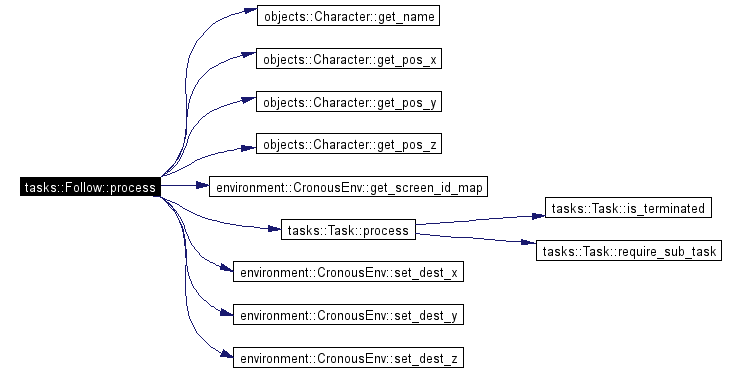 |
|
||||||||||||||||
|
関数の呼び出しグラフ:  |
|
|
関数の呼び出しグラフ:  |
|
|
tasks::Taskを再定義しています。 |
|
||||||||||||
|
|
|
||||||||||||
|
関数の呼び出しグラフ:  |
|
|
tasks::Taskを再定義しています。 関数の呼び出しグラフ:  |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.4.2-20050421
1.4.2-20050421